
 The final controller they ended up using was a basic Proportional-Derivative (PD) controller. The integral part leads to tighter approach to the set point, but is not always necessary. There being 4 degrees of control the quadcopter can be stabilized in yaw,pitch, roll and height. Basically a fully stable system should be able to hover. Linear motion on X and Y can be achieved by dropping it into an unstable state. This can be implemented as a state-space control, a multidimensional extension of the PD.
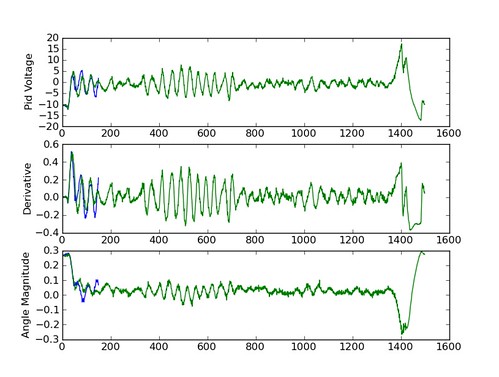
The final controller they ended up using was a basic Proportional-Derivative (PD) controller. The integral part leads to tighter approach to the set point, but is not always necessary. There being 4 degrees of control the quadcopter can be stabilized in yaw,pitch, roll and height. Basically a fully stable system should be able to hover. Linear motion on X and Y can be achieved by dropping it into an unstable state. This can be implemented as a state-space control, a multidimensional extension of the PD.The single axis stability is not too bad as it comes out here, could be better though. There is an unstable region with +/- 18 Degrees oscillation. At times given low damping the oscillations tend to build up.

No comments:
Post a Comment