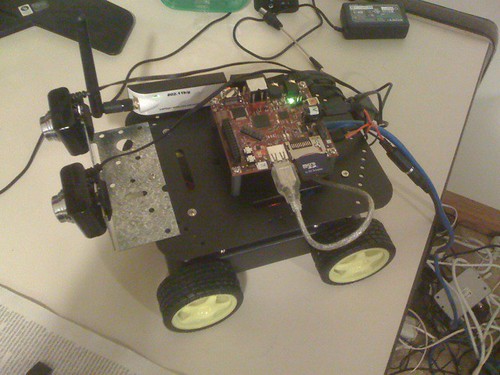
All the work with stereo vision and kinect hackery is of not much use without obstacles to sense and avoid. Hence the beagleboard is now mounted on 4 DC motors driven by the DFRobot Arduino Romeo board. The robot base is quite sturdy aluminum and has plenty of pre-drilled holes, but to mount the beagle I had to acquire my first rotary tool set.
ASUS is coming out with the PC version (Xtion PRO) of Kinect soon, which will be smaller than the original and will not have the RGB camera, it will also be purely USB powered. Perfect opportunity to use it along with the stereo vision cameras to increase the depth of field and build a platform which can use vision indoor and outdoors and in complete darkness, by combining the sensors.
Next comes getting data from the camera out wirelessly with sufficient bandwidth. I have the Beagle working with 3G modems, but this was going to be a first with a Ralink 2870 (which I got el-cheapo at DealExtreme) . With Koen's advice I decided to use the rt3070sta, the modinfo makes is obvious that this is going to work with the card:
root@beagleboard:~# modinfo rt3070sta
filename: /lib/modules/2.6.32/kernel/drivers/net/wireless/rt3070sta.ko
version: 2.3.0.4
license: GPL
description: RT2870 Wireless Lan Linux Driver
author: Paul Lin
It does not like pumping dhcp at boot time so I have to go the long way and pull it up with ifup later on. The usual gstreamer tricks work fine for sending the camera streams around:
In the beagle - gst-launch v4l2src device=/dev/video1 ! queue ! videorate ! video/x-raw-yuv,framerate=15/1 ! videoscale ! video/x-raw-yuv,width=320,height=240 ! ffmpegcolorspace ! jpegenc ! udpsink host=x.x.x.x port=xxxx
In the laptop - usr/bin/gst-launch udpsrc port=xxxx ! jpegdec ! autovideosink
Next comes pan-tilt and actual object avoidance and object following. Pass the dog a ball.
ASUS is coming out with the PC version (Xtion PRO) of Kinect soon, which will be smaller than the original and will not have the RGB camera, it will also be purely USB powered. Perfect opportunity to use it along with the stereo vision cameras to increase the depth of field and build a platform which can use vision indoor and outdoors and in complete darkness, by combining the sensors.
Next comes getting data from the camera out wirelessly with sufficient bandwidth. I have the Beagle working with 3G modems, but this was going to be a first with a Ralink 2870 (which I got el-cheapo at DealExtreme) . With Koen's advice I decided to use the rt3070sta, the modinfo makes is obvious that this is going to work with the card:
root@beagleboard:~# modinfo rt3070sta
filename: /lib/modules/2.6.32/kernel/drivers/net/wireless/rt3070sta.ko
version: 2.3.0.4
license: GPL
description: RT2870 Wireless Lan Linux Driver
author: Paul Lin
It does not like pumping dhcp at boot time so I have to go the long way and pull it up with ifup later on. The usual gstreamer tricks work fine for sending the camera streams around:
In the beagle - gst-launch v4l2src device=/dev/video1 ! queue ! videorate ! video/x-raw-yuv,framerate=15/1 ! videoscale ! video/x-raw-yuv,width=320,height=240 ! ffmpegcolorspace ! jpegenc ! udpsink host=x.x.x.x port=xxxx
In the laptop - usr/bin/gst-launch udpsrc port=xxxx ! jpegdec ! autovideosink
Next comes pan-tilt and actual object avoidance and object following. Pass the dog a ball.

No comments:
Post a Comment