More proof that I should stop obsessing on the Quadcopter and focus on my PhD and possibly Orfeo Toolbox. I am just getting started with the risks in playing with real life hardware. Today we ran our 5000kV motor at full-throttle for a few seconds - under careful supervision of the folks in the electromechanical lab. The motor overheated and burnt out producing a lot of heat, smoke and molten solder . The wires heated so much the joints melted, cutting off power before anything actually caught fire. I can explain this away in terms of lack of adequate
thermal overload protection. In what looked like a wind tunnel test - the motor kept running while producing smoke vortices underneath, I was typing 'h' away at my arduino console to make it go faster rather than documenting the great event.
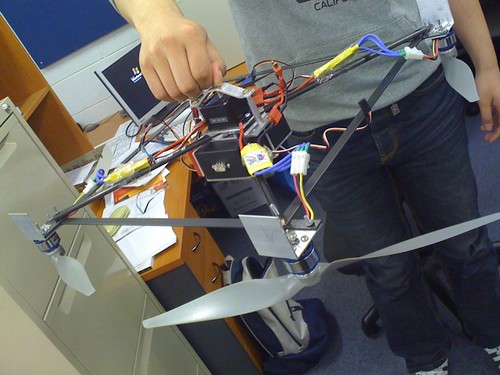
Otherwise the workshop has done a fantastic job putting together the frame and attaching the propellor hubs to the motors. We have 3 variants of propellors - 12x8, 8x6 and flimsy high speed low pitch helicopter ones. The next iteration will use
thermistors to monitor motor temperature and cut-off when overheating is detected. LiPo charge level can also be monitored with the arduino ADC's. More code for the arduino needs to be written then. No more simple bit-bang PPM. I am also contemplating getting some lower kV rated motors to turn some of the bigger props.
On the more productive and less risky side I pulled some code published in the
ITK Journal to perform KNN classification into OTB. Hope I can soon get some screenshots of KNN in action in OTB-Qgis.


No comments:
Post a Comment