It has been a really tough week, to cap it all off my passport has gone walkabout. On Friday my
3 minute thesis competition is coming up and I have been rattling off prattle about penguins and farmers in front of my iPhone timer. So far I either take 2 minutes or 3.5. The idea is to talk about the work on vegetation in Macquarie island while gaining sympathy points for trying to save wildlife. SAR is difficult to interpret by humans and we stand on the shoulders of statistics and electromagnetics founders such as
Gauss and
Maxwell. Ultimately the full importance of vegetation parameter retrieval.
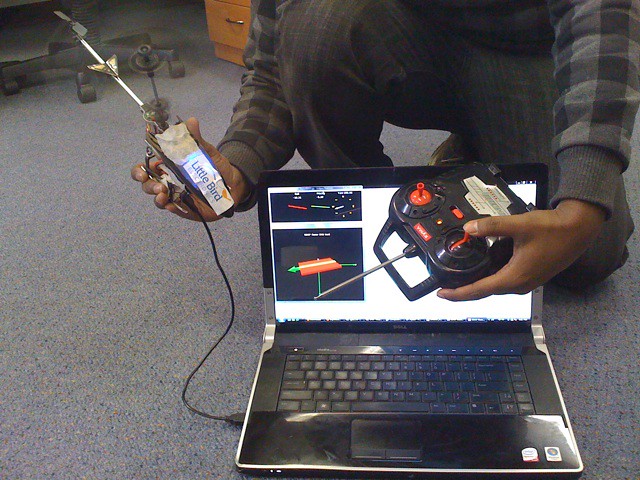
If I can keep a level head for 3 minutes then it should not be too hard for an Arduino to give me 50 stabilized attitude readings per second. I recently acquired the 9DOF
Razor IMU and works quite nicely with the supplied
Python scripts. I attached to my heli and flew it around a bit, no major pushes due to the magnets in the motors. Next I will attach an Xbee to it and stream the attitude data out of the heli.


2 comments:
Hi. I also have that 9DOF and a bluetooth module to send the data out. In your picture it looks like you have something to visualize the output. What are you using for that? I'm tired of seeing only the raw values, 3d representation would be so cool.
Best!
I am using the Python script linked to in the blog post. You may need to change the arduino firmware the 9DOF comes with for this to work.
Post a Comment