I will also need to get some Matlab integration via Mex files in place to allow classic academic usage and student projects rolling. With my budget constraints and time constraints I can offer a small bounty to get this done. Contact me if interested.
Also on the todo list is v4l2 integration and a gstreamer plugin. The principle of operations of these drivers is simple, allocate a buffer, fill it up with data from the kinect and push it up the chain for further processing instead of just displaying as current things do.
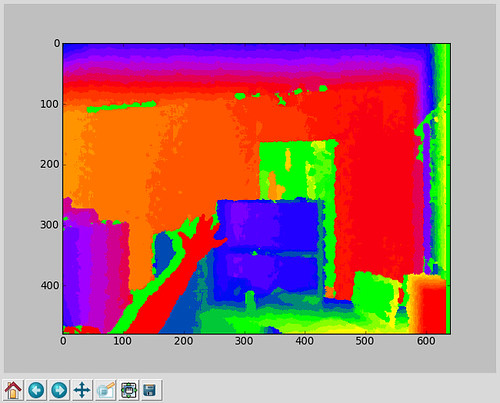
The new python wrappers for libfreenect allow me the luxury of using matplotlib colourmaps to redisplay the depth as I see fit. It introduces lags, but who cares we have depth in Python for $200.

No comments:
Post a Comment