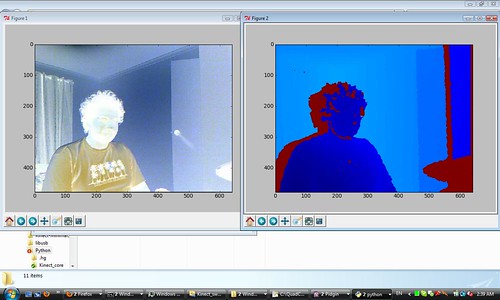
Secondly, I completed a first working version (as in can get some image buffers) of the win32 python binding from Zephod's code. I followed the swig how-to's and had to resort to typemapping to extract the image and depth buffers, but it all worked out in the end. Not quite as well as I had expected on the 1st attempt but I can replicate some of the early work on Linux in windows now. The colour's in the RGB image are flipped, I will have to change the data order. A lot of frames are dropped so the response is not as smooth as it could be.

No comments:
Post a Comment