One of the options is HFSS which uses finite element model based EM simulation. It can produce RCS of extended targets but will require modifications for SAR simulation. There has also been some work done using FEKO. I have already done some 2D plant model building using Python. Now it is time to send them into Blender and make something optically pretty.

 There is ngPlant to draw inspiration from. Where as a lot of work has been done on image formation with standard light , I have to break new ground in easy simulated image formation with SAR.
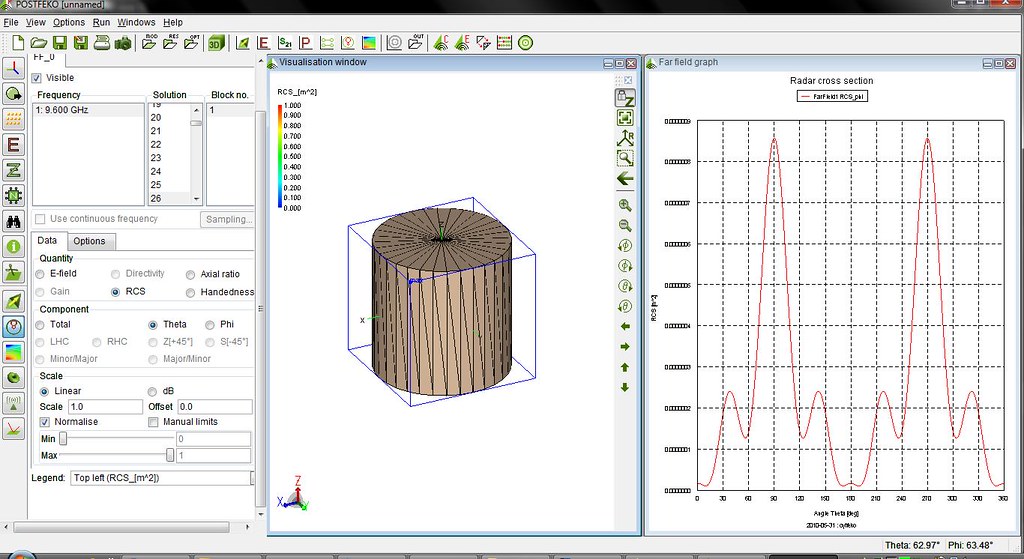
There is ngPlant to draw inspiration from. Where as a lot of work has been done on image formation with standard light , I have to break new ground in easy simulated image formation with SAR. So far I have loaded a cylinder created in blender and exported to STL as a mesh into FEKO LITE, which has severe limitations on simulation size. Just as a test case the cylinder seems to have a much greater RCS in vertical compared to horizontal.